Wolf Automation MX
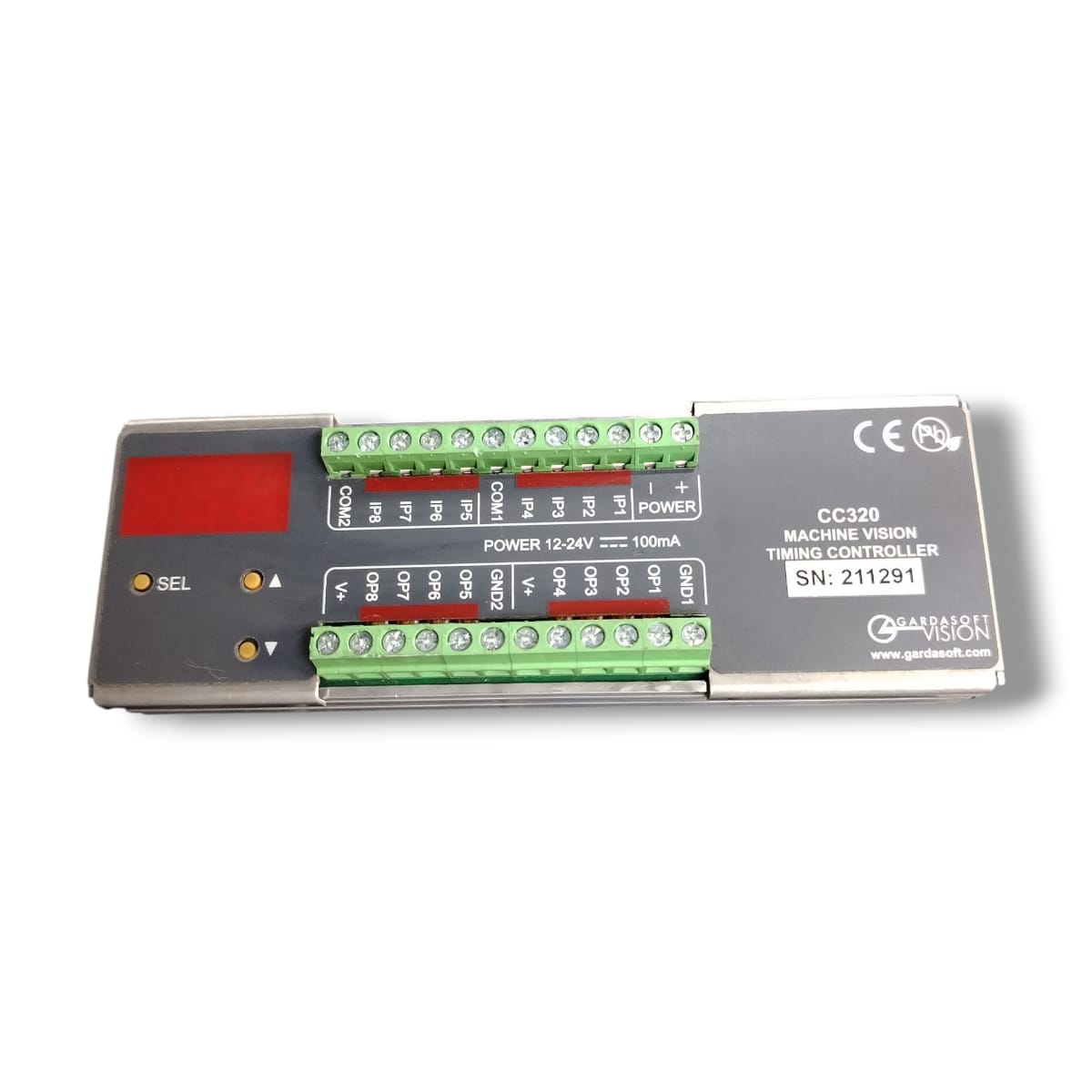
GARDA SOFT VISION CC320
GARDA SOFT VISION CC320 CONTROLADOR DE TIEMPO
controlador de tiempo para sincronizar sensores, cámaras, iluminación y compuertas de rechazo en sistemas de visión industrial
Uso típico: generar pulsos de disparo con demoras programables, coordinar cámaras, gestionar señales de sensor y sincronizar con codificadores (encoder) en sistemas de inspección automática
Número de entradas digitales: 8 canales (IP1 a IP8)
Formato de entrada: opto acopladas (“common cathode” opto input), compatibles con señales de 5 V a 24 V, con consumo de corriente entre ~3 mA y ~20 mA
Las entradas IP1 e IP2 pueden funcionar como señales de codificador (encoder) (modo de pulso / cuadratura)
Número de salidas digitales físicas: 8 canales (OP1 a OP8)
Tipo de salida: colector abierto (open-collector), puede conmutar hasta 24 V y hasta 20 mA
Salidas “virtuales”: además de las 8 físicas, posee canales virtuales (OP9 a OP16) para lógica interna / secuencias que no están conectadas físicamente
Voltaje de alimentación requerido: regulado entre 12 V DC y 24 V DC
Consumo máximo de corriente: ~ 100 mA (con disipación térmica de hasta ~ 2,4 W)
Resolución y precisión de temporización: puede generar demoras y pulsos con precisión de microsegundos
Modos de operación de salida incluyen:
Pulso basado en tiempo (delay + ancho de pulso)
• Modulación por codificador (pulsos basados en posición / desplazamiento)
• Re-sincronización (re-synchronization) del pulso de rechazo basado en tiempo original de sensor, evitando variabilidad por procesamiento de imagen
• FIFO / buffer de múltiples productos simultáneos para coordinar rechazos en cinta transportadora con varios objetos en tránsito f
Interfaz de configuración / comunicación: Ethernet TCP/IP, servidor web embebido, comandos sobre TCP o UDP
Configuración local: mediante botones / pantalla en el frontal del equipo, si no se dispone de conexión Ethernet
Almacenamiento de parámetros: memoria no volátil — conserva configuración tras reinicios o fallos de energía
Dimensiones externas (sin incluir fijaciones DIN): aproximadamente 146 mm × 49 mm × 24 m
Montaje: riel DIN o montaje en panel, según aplicación
Rango de temperatura de operación: aproximadamente +5 °C a +60 °C
No tiene clasificación IP — debe instalarse en entorno protegido frente a polvo / humedad (carcasa interna)
Protección contra transitorios: cargas inductivas externas requieren supresión externa (no toda protección interna)
No debe excederse el voltaje de entrada y salida máximos especificados para evitar daños internos
EQUIPO USADO FUNCIONANDO
No se pudo cargar la disponibilidad para recogida